
Lunar Atlases

The USGS has released a set of high-res maps that show the topography of the moon
The US Geological Survey recently published a pair of highly detailed lunar maps that provide an unprecedented look at the moon’s surface. The pair of maps were assembled using information from NASA’s Lunar Reconnaissance Orbiter (LRO) spacecraft and recently published in high-resolution format on the USGS website for printing or download.
The new maps replace the existing Lunar Chart (LPC-1), which was produced in 1979 as a series of airbrushed drawings based on existing telescopic and orbital lunar images. The chart was flat in design and did not provide any elevation data. The new maps, on the other hand, are derived directly from digital photographs and include both a photo mosaic of the moon’s surface and a topographic map that represents elevation data.
The following photo mosaics uses images from LRO’s wide-angle camera and allows you to view prominent physical features such as craters and volcanoes on the moon’s surface. The topo map compiles the data obtained from the Lunar Orbiter Laser Altimeter (LOLA) which was installed on the LRO to collect elevation data. It represents lunar elevation in a gradient where blue is a low altitude and gray is a high altitude.
These maps were designed to help both the public and scientists understand the overall appearance and topography of the moon. The maps provide enough detail that amateur astronomers can compare features they see on their telescope with those on the map. It also allows enthusiasts to locate historically important features such as the Apollo landing sites from the comfort of their home.
These image mosaics are based on data from the Lunar Reconnaissance Orbiter Wide Angle Camera (WAC), an instrument on the National Aeronautics and Space Administration (NASA) Lunar Reconnaissance Orbiter (LRO) spacecraft.
All named features greater than 85 km in diameter or length were included unless they were not visible on the map. Some selected well-known features less than 85 km in size were
also included.

LRO Photo Mosaic Map
This image mosaic is based on data from the Lunar Reconnaissance Orbiter Wide Angle Camera (WAC), an instrument on the National Aeronautics and Space Administration (NASA) Lunar Reconnaissance Orbiter (LRO) spacecraft.
The equatorial WAC images were ortho-rectified onto the Global Lunar Digital Terrain Mosaic (GLD100, WAC-derived 100 m/pixel digital elevation model, while the polar images were ortho-rectified onto the lunar LOLA polar digital elevation models.
The Mercator projection is used between latitudes ±57°, with a central meridian at 0° longitude and latitude equal to the nominal scale at 0°. The Polar Stereographic projection is used for the regions north of the +55° parallel and south of the –55° parallel, with a central meridian set for both at 0° and a latitude of true scale at +90° and -90°, respectively.
All named features greater than 85 km in diameter or length were included unless they were not visible on the map. Some selected well-known features less than 85 km in size were also included.

LOLA Topographic Map
This map is based on data from the Lunar Orbiter Laser Altimeter (LOLA), an instrument on the National Aeronautics and Space Administration (NASA) Lunar Reconnaissance Orbiter.
The image used for the base of this map represents more than 6.5 billion measurements gathered between July 2009 and July 2013, adjusted for consistency in the coordinate system described below, and then converted to lunar radii.
For the Mercator portion, these measurements were converted into a digital elevation model (DEM) with a resolution of 0.015625 degrees per pixel, or 64 pixels per degree. In projection, the pixels are 473.8 m in size at the equator. For the polar portion, the LOLA elevation points were used to create a DEM at 240 meters per pixel.
A shaded relief map was generated from each DEM with a sun angle of 45° from horizontal, and a sun azimuth of 270°, as measured clockwise from north with no vertical exaggeration. The DEM values were then mapped to a global color look-up table, with each color representing a range of 1 km of elevation.
For this map, only larger feature names are shown.
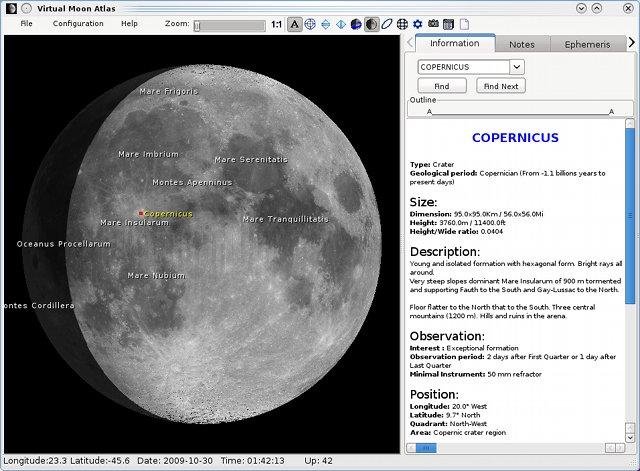
Virtual Moon Atlas – An Open Source Lunar Atlas Software
Virtual Moon Atlas (VMA) – is a freeware to support observations of the Moon and as a tool for public engagement with Earth’s satellite. Over the past 15 years, the project has had more than 1.7 million downloads from users all over the world and has evolved to include a database with nearly 60 000 entries of features and formations on the Moon’s near and far side. Textures include maps from space missions, historical textures permitting easy comparison of work by astronomy pioneers with present data, and a range of scientific overlays, including gravity, temperature, geology, altimetric data, and various chemical elements.
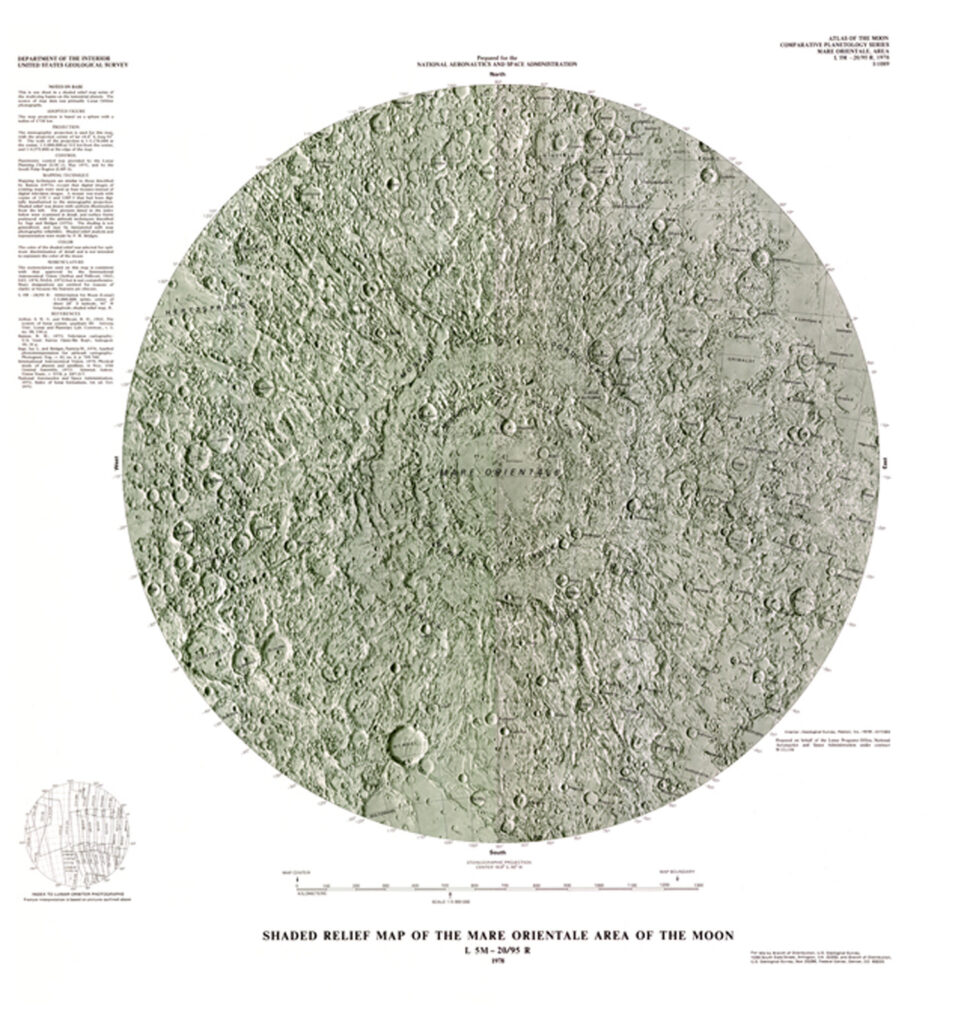
I-1089 Shaded Relief Map of the Mare Orientale Area of the Moon

I-1218-A map Showing Relief and Surface Markings on the Lunar Far Side
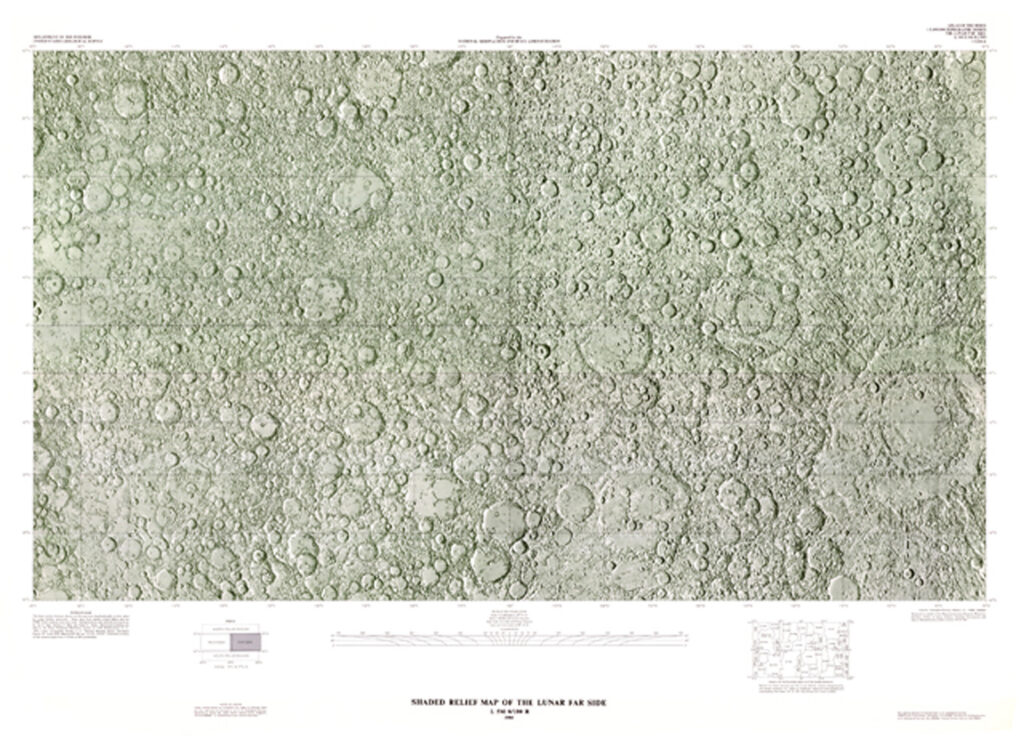
I-1218-B Shaded Relief Map of the Lunar Far Side
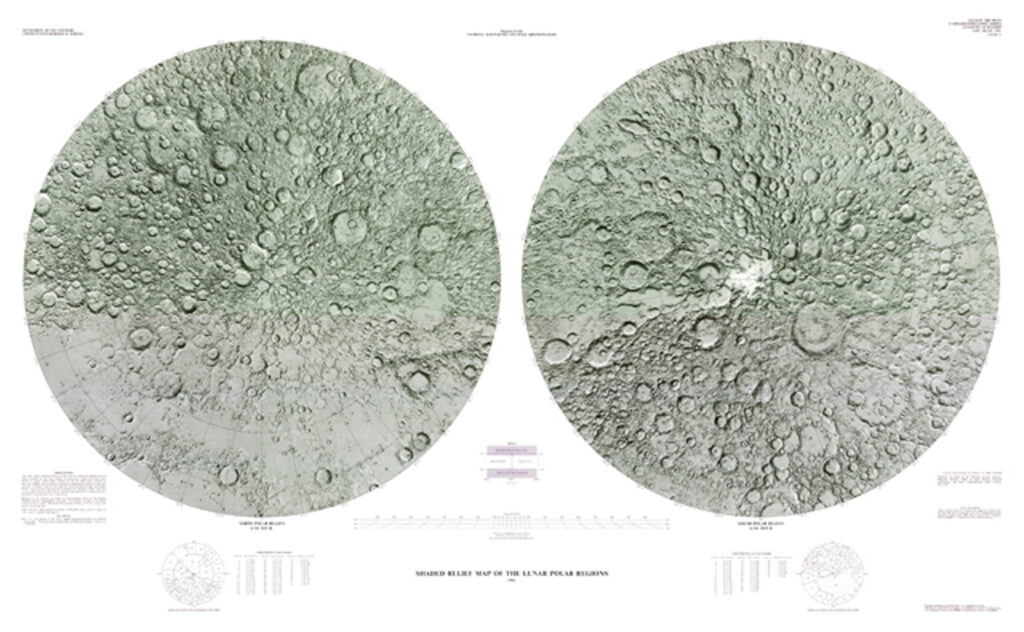
I-1326A Shaded Relief Map of the Lunar Polar Regions
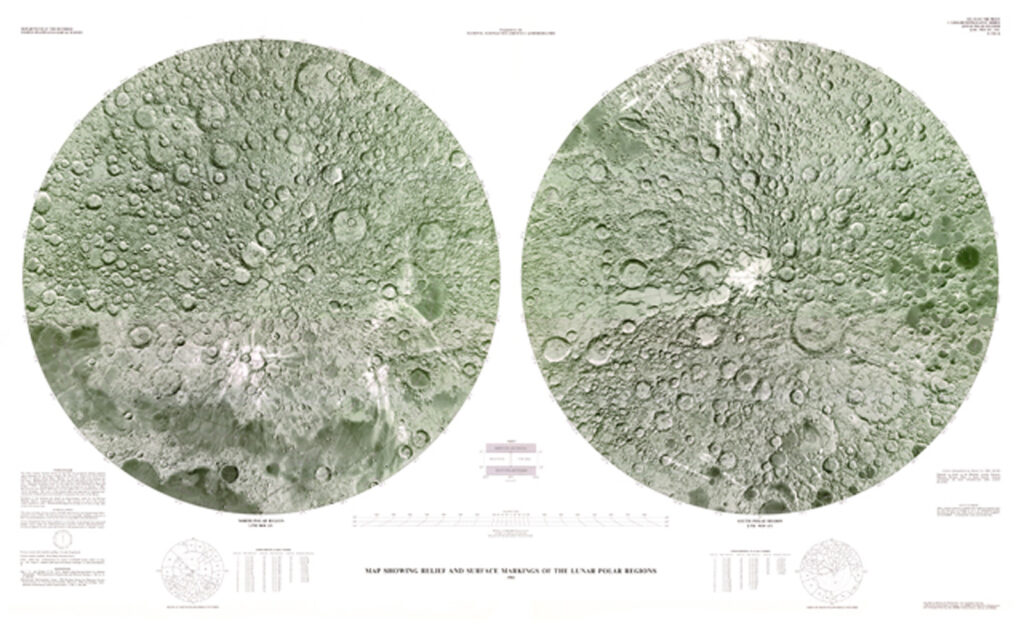
I-1326-B Map Showing Relief and Surface Markings of the Lunar Polar Region
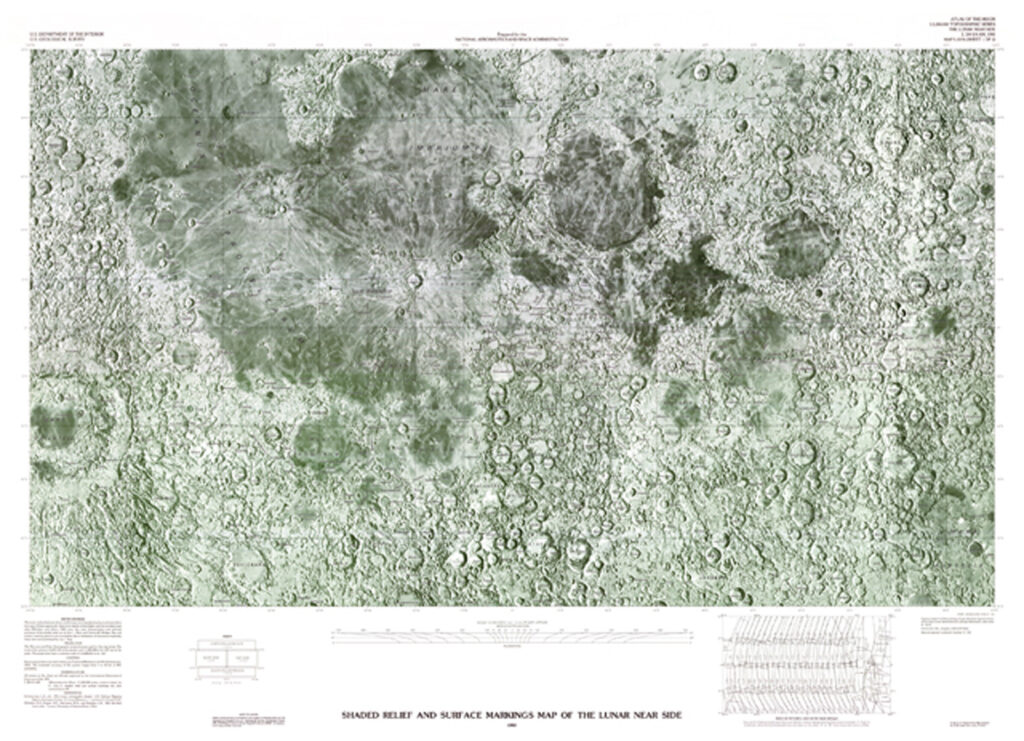
I-2276-A Shaded Relief and Surface Markings Map of the Lunar Near Side
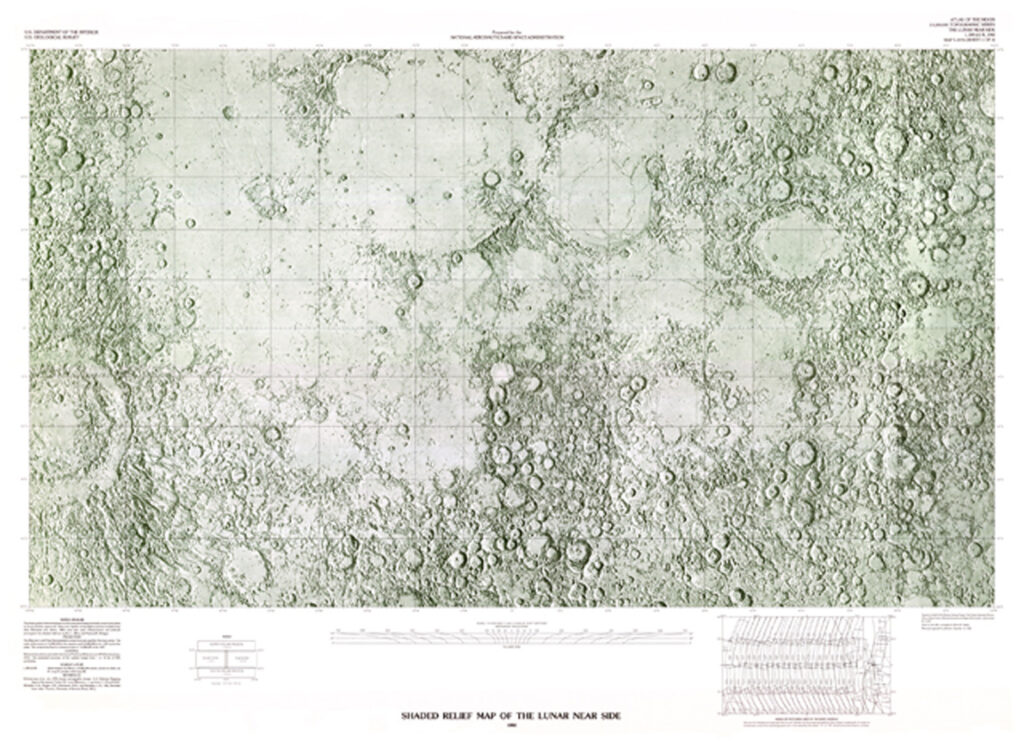
I-2276-B shaded Relief Map of the Lunar Near Side